
2021年7月25日至8月3日,教育部集成攻关大平台学院海洋工程团队研制的深海重载作业采矿车“开拓一号”,搭载于“向阳红03”号科考船,在我国南海西沙海域成功完成了1300米深海试验。不需要任何人工操控,“开拓一号”能根据预先设置好的程序,在海底一会儿走出“S”形,一会儿走出“J”形。除了在海底自主行走的能力,它的业务能力也非同一般:能自主感知周边的采矿环境。
深海采矿不需人工操控也能自主行走
本次海试,“开拓一号”深海采矿车在不同海区分别布放至108米、246米、968米和1305米等多个水深的海底,成功完成重载装备海上布放回收、海底路径规划与自主行走、海底矿石采集与沉积物取样等试验,突破了深水大功率液压、高压电力能源供给、信号传输与智能控制、水下布放回收姿态自动控制、海底行走与矿石采集等深海重载作业装备研发的关键技术。

图1 布放过程中的深海采矿车
采用创新研发的海底智能自主行走技术,“开拓一号”采矿车首次在1305米的深海复杂地质条件下,实现智能自主行走,通过水下精确定位信息感知和闭环反馈控制,由智能控制系统实时、自动控制采矿车行走,实现在无人操控条件下,采矿车按照预先规划的任意大曲率曲线路径,在海底自主行走和作业。

图2 深海采矿车海底着陆

图3 深海采矿车在海底自主行走
此次海试,采矿车在西沙海域海底多次成功完成“SJ”字样行走路线,进行了复杂地形条件下的大曲率曲线路径行走、小半径原地掉头等机动,显示采矿车具有出色的智能控制水平,和突出的海底作业能力。
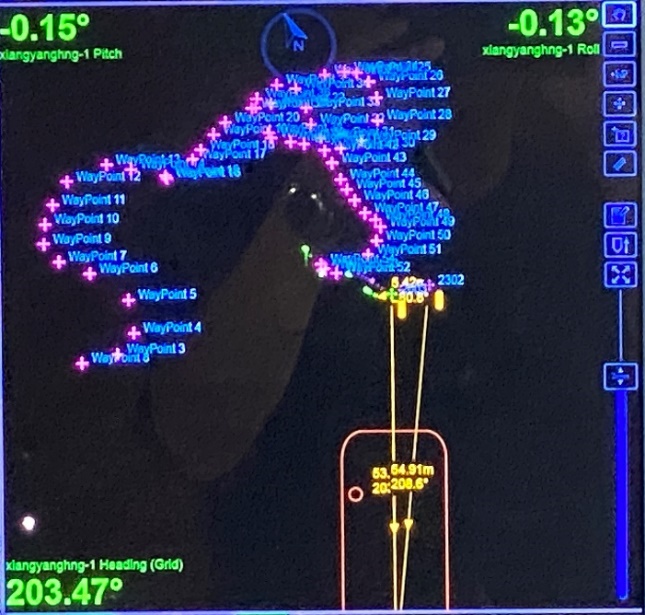
图4 超短基线测量得到的采矿车海底“SJ”字样行走路径
交大智慧突破重载装备海上布放回收难题
针对重载装备海上安全布放和回收难题,项目组创新研发采矿车水中运动姿态自动控制技术,通过推进器推力的实时分配,稳定保持采矿车在深水长时间布放回收过程中的艏向角,有效减小光电复合缆扭转载荷,在试验海域遭遇2米波高、7级阵风高海况条件的不利情况下,成功实现重载装备的安全布放与回收。
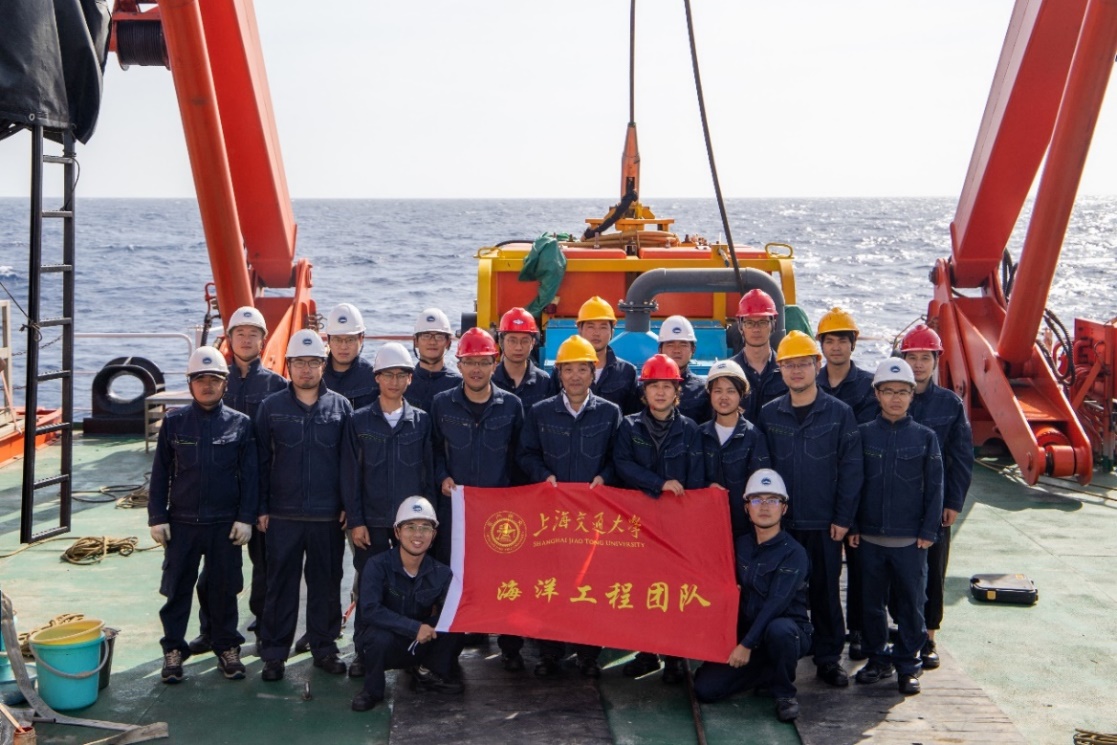
图5 项目团队在海试现场
“开拓一号”深海采矿车以海底多金属结核为开发作业对象,长5.6米,宽2.5米,高2.0米,空气中重量9.0吨,具有海底作业环境感知、智能自主控制、高效水力集矿等作业能力。此次海试成功,标志着深海重载作业采矿车研发向工程化、智能化迈出了重要的一步。



